|
|
|
| |
Plenary & Semi Plenary speakers
|
Robust Control Systems for Modern Power Electronics: Applications and Challenges
Speaker: Doctor Sajjad (Fekri) Fekriasl
|
|
Power electronics has had rapid development in the last decade and is currently used in wider real-life applications. Along with the above, Power Electronics also lays the foundations of our future life by providing us with alternative, long-term solutions for environmentally clean renewable energy resources. While a variety of power converter topologies have been already developed, many novel and complex topologies are designed every day. However, the bulk of their control systems are mostly remained in the “tuned” traditional controllers such as PIDs; such controller is actually tuned for the nominal operational condition, and thus may not yield satisfactory performance (or even stability) for the full envelope of converter operating conditions. In addition, there are inherent perturbations in the power converter systems that cannot be addressed by these tuned controllers. Electrical elements (parametric) uncertainties, transportation and computational (complex-valued) delays, load variations, voltage source distortions, unmeasured external disturbances and sensor noises are examples of such perturbations. Advanced robust controller design techniques can aid development for new converter systems with guaranteed stability and improved performance. In addition, they offer clear design guidelines so as to reduce the cost and size of converters. The goal of this talk is to review and discuss the applications of advanced robust control systems in challenging power electronics systems. Some of the results including fast DC converters for Electrical Vehicles battery charging systems will be presented and discussed, along with the future directions of power transmissions and renewable power sources applications, such as HVDC, Wind power and Solar photovoltaic (PV) systems.
 |
Doctor Sajjad (Fekri) Fekriasl
ALSTOM Grid
Stafford, United Kingdom
email: sajjad (dot) fekriasl (at) alstom (dot) com
Dr Sajjad (Fekri) Fekriasl is Principal Technologist with Advanced Research and Technology Centre (ART) at ALSTOM Grid, Stafford, UK. He has taken several roles in the past including R&D leading and university lectureship, particularly in the area of robust multivariable control systems design for aerospace and automotive applications. Sajjad received his BSc (Hons) and MSc (Hons) degrees in Electrical Engineering from Tabriz University, Iran, in 1995 and 1997, respectively. In January 2006, he received his PhD degree in Electrical Engineering and Computer Science from Instituto Superior Tecnico (IST), Lisbon, Portugal. His PhD thesis, under supervision of Prof. Michael Athans (of MIT, MA, USA) and Prof. Antonio Pascoal pioneered a novel methodology for the synthesis of Robust Multiple-Model Adaptive Control - RMMAC - an advanced control system design methodology for highly uncertain dynamical systems by integrating advances of both Adaptive Control and Robust (Non-adaptive) Control. Sajjad was a Lecturer with Automotive Engineering Department, School of Engineering, Cranfield University, UK (2010-2012), where he also led a number of successful R&D projects in the areas of advanced control systems design for modern automotive control applications. He was a Post-Doctorate Researcher (2006-2007) and Research Fellow (2007-2010) with Department of Electrical Engineering, University of Leicester, UK, where, in conjunction with the BAE SYSTEMS, he conducted two prestigious applied research projects on advanced robust flight control systems - ASTRAEA and FLAVIIR. During the period 1998-2001, Dr Fekriasl was Assistant Professor at Department of Electrical Engineering, Tabriz Azad University, Tabriz and he also collaborated with a number of Electrical Engineering Consultancies at the same time. Sajjad has co-authored more than 35 technical articles including book chapters and invited articles. His current research focus is on the theory and application of robust control systems for modern power electronics applications, with an emphasis on synthesis of multivariable control systems, mu synthesis and software, and linear and nonlinear estimation.
|
|
| |
Industrial application of condition monitoring and diagnosis - prospects and pitfalls?
Speaker: Doctor Alexander Horch
|
|
There is a considerable gap between academic research and industrial practice in the area of fault detection, fault isolation and fault-tolerant control. Reasons for this are manifold and will be discussed based on concrete examples from industry. On one side there are increasing requirements on operational excellence in process plants. On the other side there is only a minimal workforce available for operation and maintenance. Automation of fault detection and isolation on one side and fault-tolerance on the other side should therefore be self-evident. They are, however, not. The talk will discuss reasons for this and show examples from industry where those obstacles have been overcome. As a consequence, some possible directions for academic research as well as success criteria will be pointed out.
 |
Doctor Alexander Horch
ABB Corporate Research Center
Department Head Automation Device Technologies
Wallstadter Straße 59, 68526 Ladenburg, Germany
email: alexander (dot) horch (at) de (dot) abb (dot) com
Alexander Horch received his MSc in Engineering Cybernetics from the University of Stuttgart, Germany (1996) and his PhD in Automatic Control from the Royal Institute of Technology in Stockholm, Sweden (2000).
From 2001 at ABB Corporate Research Germany as scientist and project leader for automatic analysis of process data in the process and power plant industries. Applications range from pulp and paper industry, rolling mills, oil and gas industry to power plants as well as chemical plants.
From 2006 group leader ‘Process and Production Optimization’ and world-wide coordination of production management research for ABB Corporate Research.
His main interests are in supervision, control, scheduling and optimization of industrial processes. From 2005 to 2011 he chaired a working group at the German VDI/VDE on ‘Plant Asset Management’.
Alexander Horch is a Certified Project Management Professional (PMP) from the Project Management Institute (PMI) since 2006 and a Certified Automation Professional (CAP) from ISA since 2009.
Since 2011 he heads the Automation Department at ABB Corporate Research in Switzerland. The department focuses on systems solutions for industrial automation as well as operation and optimization of electric power grids.
|
|
| |
Adapting dynamic reliability from probabilistic safety analysis to fault-tolerant control?
Speaker: Professor Pierre-Etienne Labeau
|
|
Dynamic reliability is a general modeling framework that allows to accounting for the hybrid (i.e. discrete-continuous) nature of reliability and safety problems. It actually originates from the fields of probabilistic safety analysis, a.o. for nuclear power plants, and from attempts at accounting for control devices in system reliability theory.
The proposed talk aims to review the concepts and methodology of dynamic reliability and their potential applications to fault-tolerant control and other applications.
 |
Professor Pierre-Etienne Labeau
Service de Métrologie Nucléaire (CP165/84)
Ecole Polytechnique de Bruxelles – Université Libre de Bruxelles
Av. F.D. Roosevelt, 50 – B-1050 Bruxelles, Belgium
e-mail: pelabeau (at) ulb (dot) ac (dot) be
Curriculum vitae - Pierre Etienne Labeau
|
|
| |
Fault tolerant control using Gaussian processes and model predictive control
Speaker: Professor Jan Maciejowski
|
|
Essential ingredients for fault-tolerant control are the ability to represent system behaviour following the occurence of a fault, and the ability to exploit this representation for deciding control actions. Gaussian processes seem to be very promising candidates for the first of these, and model predictive control has a proven capability for the second. We therefore proopose to use the two together to obtain fault-tolerant control functionality.
 |
Professor Jan Maciejowski
Cambridge University Engineering Dept
Trumpington Street, Cambridge CB2 1PZ, England
email: jmm (at) eng (dot) cam (dot) ac (dot) uk
Jan Maciejowski received a B.Sc degree in Automatic Control from Sussex University in 1971 and a Ph.D degree in Control Engineering from Cambridge University in 1978. From 1971 to 1974 he was a Systems Engineer with Marconi Space and Defence Systems Ltd, working mostly on attitude control of spacecraft and high-altitude balloon platforms. Since 1981 he has been at the University of Cambridge, where he is now Professor of Control Engineering and Head of the Information Engineering Division. He was President of the European Union Control Association from 2003 to 2005, and President of the Institute of Measurement and Control in 2002. He is a Fellow of the IET, the InstMC, and the IEEE, and was a "Distinguished Lecturer" of the IEEE Control Systems Society from 2001 to 2006. He is also President (Deputy Master) of Pembroke College Cambridge. He was awarded the Honeywell International Medal by the InstMC in 2008. His book "Multivariable Feedback Design", published in 1989, received the IFAC Control Engineering Textbook Prize in 1996. In 2002 he published "Predictive Control with Constraints", the Japanese translation of which was awarded the Best Textbook Prize of the Japanese Society for Instrumentation and Control Engineering in 2007. His current research interests are in the theory and applications of predictive control, its application to fault-tolerant control, in system identification, and in the control of autonomous systems.
|
|
| |
LPV methods for fault-tolerant vehicle dynamic control
Speaker: Professor Olivier Sename
|
|
This talk aims at presenting the interest of the Linear Parameter Varying methods for vehicle dynamics control, in particular when some actuators may be in failure. The cases of the semi-active suspension control problem and the yaw control using braking and steering actuators will be presented.
In the first part, we will consider the semi-active suspension control problem, where some sensors or actuator (damper leakage) faults are considered. From a quarter-car vehicle model including a non linear semi-active damper model, an LPV model will be described, accounting for some sensors/actuators fault represented as some varying parameters. A single LPV fault-tolerant control approach is then developed to handle the system performances and constraints.
In the second part the synthesis of a robust gain-scheduled $H_\infty$ MIMO vehicle dynamic stability controller (VDSC), involving both steering and rear braking actuators, is proposed to improve the yaw stability and lateral performances. An original LPV method for actuator coordination is proposed, when the actuator limitations and eventually failures, are taken into account. Some simulations on a complex full vehicle model (which has been validated on a real car), subject to critical driving situations (in particular a loss of some actuator), show the efficiency and robustness of the proposed solution.
 |
Professor Olivier Sename
Grenoble Institute of Technology
GIPSA-lab / Control System department UMR 5216
Rue de la Houille Blanche, ENSE3 BP46 - BP46, 38402 Saint Martin d'Hères, France
email: olivier (dot) sename (at) gipsa-lab (dot) grenoble-inp (dot) fr
Olivier Sename was born in Lille (France) in 1969. He received a degree in Mechanical Engineering and Automatic Control from the Ecole Centrale Nantes in 1991, where he also completed his Ph.D. degree in Automatic control in 1994 on the topic of time-delay systems.
He did his national service in SITIA Nantes, and has been employed as an Assistant Professor at the Institut National Polytechnique de Grenoble (Laboratoire d’Automatique de Grenoble) since 1995. He is now Professor at the Grenoble Institute of Technology (Grenoble INP), within the GIPSA-lab (department of Control Systems). His main research interests include theoretical studies in the field of time-delay systems, Linear parameter Varying systems and control/real-time scheduling codesign, as well as robust control for various applications such as vehicle dynamics, engine controls, underwater autonomous vehicle and energy systems. He has collaborated with several industrial partners (Renault, SOBEN, Delphi Diesel Systems, Saint-Gobain Vetrotex, PSA, ST Microelectronics), and is Responsible of international bilateral research projects (Mexico, Hungary). Prof O.Sename is the (co-)author of 1 book (Semi-Active Suspension Control Design for Vehicles by S.M. Savaresi, C. Poussot-Vassal, C. Spelta, O. Sename & L. Dugard, Butterworth-Heinemann 2011), 7 book chapters, 35 international journal papers, and more than 140 international conference papers. He has supervised 20 Ph.D. students.
|
|
| |
Challenges, Opportunities, and Developments on Fault-Tolerant Control with Applications to Autonomous Unmanned Systems
Speaker: Professor Youmin Zhang
|
|
Unmanned systems including Unmanned Aerial Vehicles/Systems (UAVs or UASs), Unmanned Ground Vehicles (UGVs), and Unmanned Surface/Underwater Vehicles (USVs/UUVs), etc. are gaining more and more attention during the last few years due to their important contributions and cost-effective applications in several tasks such as surveillance, sense, search, rescue, geographic studies, military and security applications. On the other hand, health management and fault-tolerant control of manned aerial vehicles have a long history since the initial research on self-repairing flight control systems in US Air Force and NASA begun in mid-1980s. However, due to safety concern of manned aerial vehicles to the pilot, experimental tests and further practical research and development have been limited. Benefited from the recent and significant advance and development of UAVs, development and application of autonomous, fault-tolerant, as well as cooperative control techniques have been emerged and developed quickly in recent years, since UAVs provide a cheap and operative experimental testbed for development, implementation, testing and validation of the newly developed autonomous, fault-tolerant, as well as cooperative guidance, navigation and control techniques.
In this talk, a brief review on the development of fault-tolerant control techniques in the manned aircraft systems will be presented firstly, then the challenges and opportunities on autonomy and fault-tolerant control of unmanned systems will be given secondly, and finally the latest developments and current research work in this active research and development area with applications to autonomous fixed-wing and rotary-wing UAVs will be introduced.
 |
Professor Youmin Zhang
Diagnosis, Flight Control and Simulation (DFCS) Lab.
Networked Autonomous Vehicles (NAV) Lab.
Department of Mechanical and Industrial Engineering
& Concordia Institute of Aerospace Design and Innovation (CIADI)
Concordia University
1515 St. Catherine W., EV 12-103, Montreal, Quebec, Canada H3G 2W1
email: ymzhang (at) encs (dot) concordia (dot) ca
Youmin Zhang is an Associate Professor in the Department of Mechanical and Industrial Engineering and the Concordia Institute of Aerospace Design and Innovation (CIADI) at Concordia University, Canada. His main research interests and experience are in the areas of condition monitoring, fault diagnosis and fault-tolerant (flight) control systems; cooperative guidance, navigation and control of unmanned aerial/ground/surface vehicles; dynamic systems modeling, estimation, identification and control; and advanced signal processing techniques for diagnosis, prognosis and health management of safety-critical systems, renewable energy systems and manufacturing processes. He has published 4 books with co-authors (including a book on “Active Fault Tolerant Control Systems: Stochastic Analysis and Synthesis” (2003) and a book on “Fault Diagnosis and Fault Accommodation for Control Systems” (2009)), over 250 journal and conference papers. His comprehensive review paper published at Annual Reviews in Control on “Bibliographical Review on Reconfigurable Fault-tolerant Control Systems” has gained significant impact in the field worldwide. The paper has been ranked No. 1 in the “Most Cited Articles” published since 2007 and the highest citation ever in the journal after the paper published in Dec. 2008. Dr. Zhang has been invited to give international conference plenary talks and research seminars worldwide for more than 40 times since 2005. He is a senior member of AIAA, a senior member of IEEE, a member of the IFAC Technical Committee on Fault Detection, Supervision and Safety for Technical Processes, a member of the AIAA Infotech@Aerospace Program Committee (PC) on Unmanned Systems, a member of the IEEE Robotics and Automation Society Technical Committee (TC) on Aerial Robotics and Unmanned Aerial Vehicles, and a member of the ASME/IEEE TC on Mechatronics and Embedded Systems and Applications (MESA). He is an Editorial Board Member and/or Associate Editor of several international journals (including the two new journals of Unmanned Systems and International Journal of Intelligent Unmanned Systems) and IPC member of many international conferences.
|
|
|
|
|
|
|
|
|
|
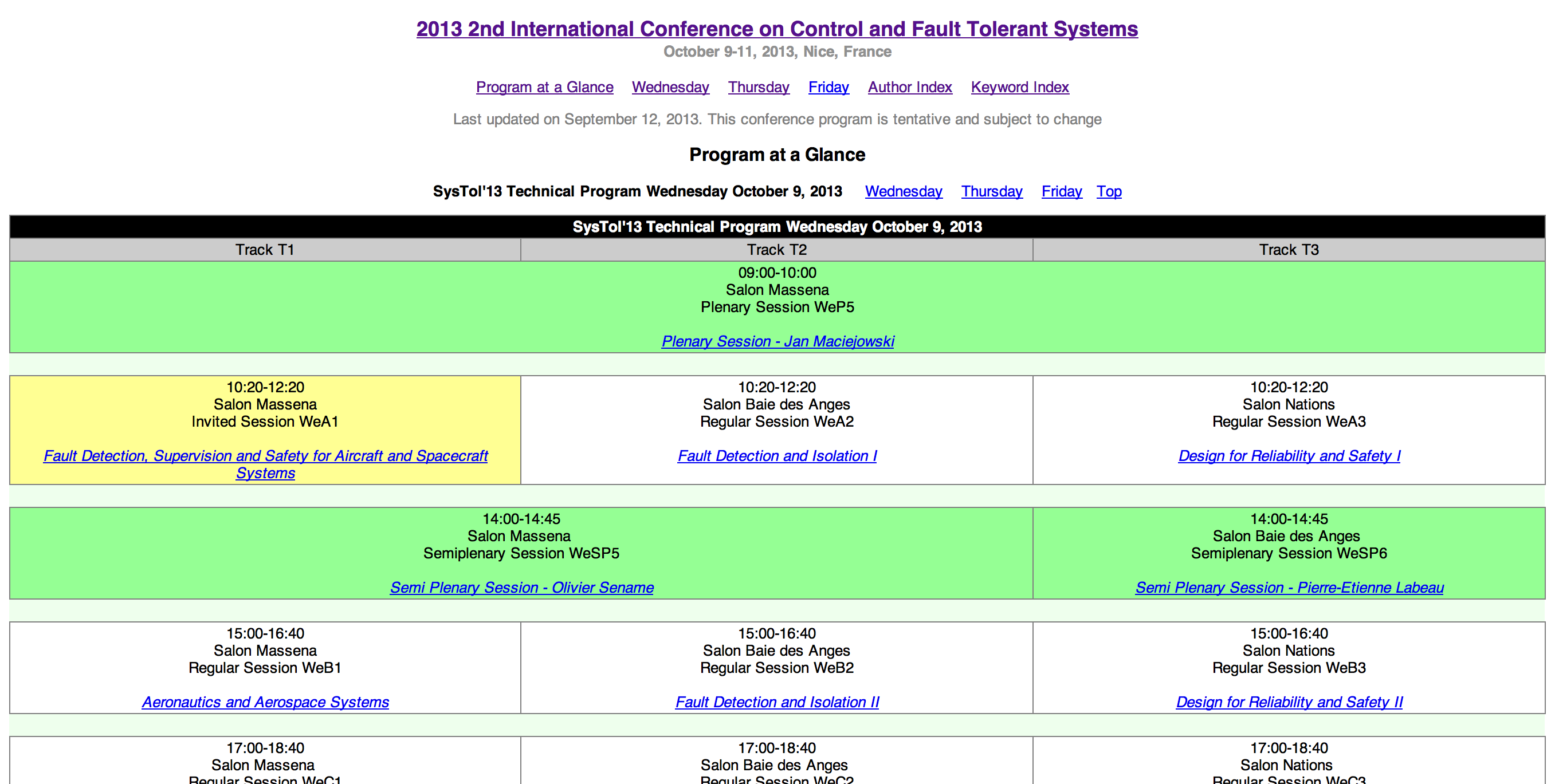
TECHNICAL PROGRAM>>
PLENARY & SEMI PLENARY SPEAKERS>>
PREVIOUS EDITION:
 SysTol’10 SysTol’10
FINANCIAL SPONSOR:
TECHNICAL CO-SPONSORS:
FINANCIAL CO-SPONSOR:
|